SIMERO 2023
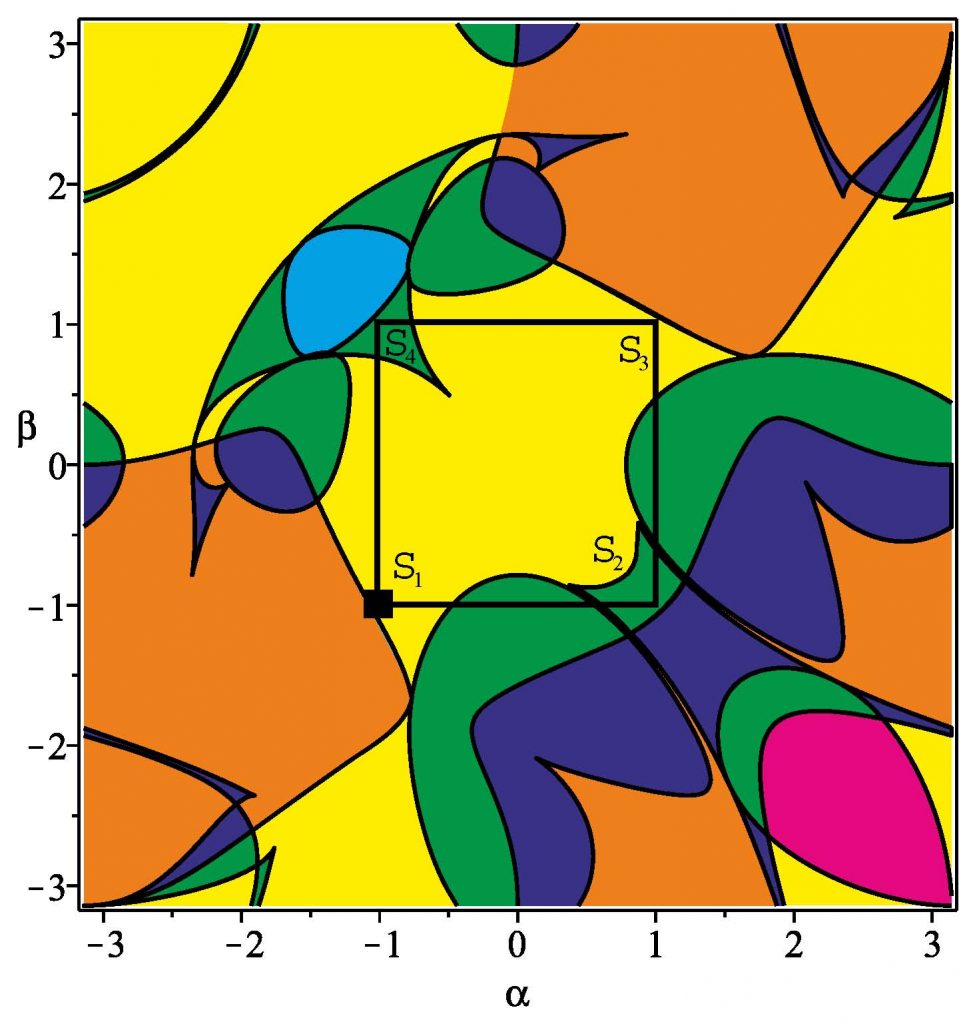
The understanding of singularities is crucial for the design, control, and application of robot manipulators. Singularities are of great interest for the IFToMM community as they govern the general kinematic behavior of mechanisms and robots. Besides the theoretical significance of a careful study of singular phenomena, it has an enormous practical value. This course introduces attendees to milestone results, key methods, and main problems in singularity analysis. The lectures provide a wide overview of cutting-edge work and focus in more detail on a few advanced topics with practical and theoretical significance.
Topics: Definition and Classification, Singularity Identification, Singularity Avoidance, Local and global topology of the Singularity set and configuration-space, Mathematical tools and formalisms.
Each part contains lectures on several closely related topics. However, connections are also made between the parts and common themes are identified and explored from different viewpoints. This reinforces both learning about the phenomena and an understanding of their importance, while providing the participants with varied conceptual and methodological tools applicable to the problems at hand.
- Definition and Classification
- Singularity Identification
- Singularity Avoidance
- Local and global topology of the Singularity Set and Configuration-Space
- Mathematical Tools and Formalisms
Latest News
Mechanisms—Synthesis and Analysis with Applications in Robotics
Read full article
The IFToMM International Symposium on Emerging Fields in Mechanism and Machine Science (EFIMMS 2026)
Read full article
The 7th Students International Olympiad On Mechanism and Machine Science Successfully Held at Shendong University, China
Read full article
Invitation for the 7th Students International Olympiad On Mechanism and Machine Science (SIOMMS2026)
Read full article
The 6th International Student Olympiad on Theory of Machines and Mechanisms (SIOMMS2025)
Read full article
Animated Lectures: Mobility of Mechanisms and Robot Manipulators
Read full article
9th IFToMM International Workshop On New Trends In Medical And Service Robotics (MeSRob’25)
Read full article
MECHANICAL ENGINEERING SOLUTIONS: Design, Simulation, Testing and Manufacturing (MES-2025)
Read full article
 Find your
Find your